Till now, we have covered the Introduction to Process Synchronization up to the Critical Section Problem. Before reading this post, please read the following post on Process Synchronization:-
In this post, we will see the 1st solution to the 2-process synchronization problem which uses a shared variable turn. We name the 2 processes P0 and P1.
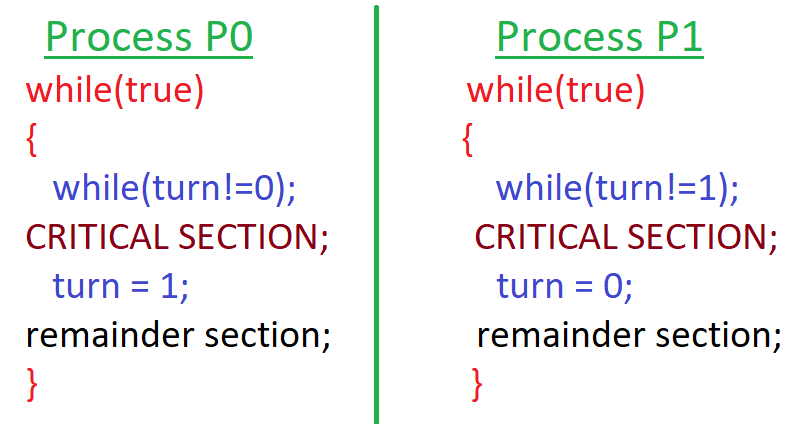
Turn Variable Solution to 2-process Synchronization Problem
The solution code can be shown by the diagram below:-
Analysis
- turn is a shared boolean variable which can hold the value either 0 or 1
- Process P0 waits in an infinite loop until turn value is 0, only then can it enter the Critical Section
- When P0 exits Critical Section, it sets turn = 1 to enable Process P1 to enter the Critical Section
- The code is extremely symmetric and easy to understand. Please observe it with some time in hand.
We will now analyze the Turn Variable algorithm with respect to the 3 conditions in our previous post.
Mutual Exclusion
Let Process P0 be in its critical section. This means that turn = 0 at the moment. Until and unless P0 exits critical section and sets turn = 1, Process P1 cannot enter the critical section. The analysis is similar if we start with process P1. So, mutual exclusion HOLDS.
Progress
Progress
Let Process P0 be inside its critical section. It finishes its critical section and sets turn = 1. Now, let us assume P0 again wants to enter its critical section. It will not be able to, as long as Process P1 enters its critical section at least once and sets turn = 0 after exiting. So, if Process P1 is not interested to enter its critical section, in a way, it is blocking the entry of an interested process P0 to the critical section even though there is no process currently in its critical section. So, Progress DOES NOT HOLD.
BOUNDED WAITING
Here, we find that strict alternation exists. In other words, the only possible execution sequence is one process followed by the other. So, bounded waiting definitely HOLDS.
Conclusion
This is an incorrect solution to the 2-process synchronization problem as Progress does not hold. In the next post, we will analyze the exact reason why this problem is occurring and try to develop a better solution.
BOUNDED WAITING
Here, we find that strict alternation exists. In other words, the only possible execution sequence is one process followed by the other. So, bounded waiting definitely HOLDS.
Conclusion
This is an incorrect solution to the 2-process synchronization problem as Progress does not hold. In the next post, we will analyze the exact reason why this problem is occurring and try to develop a better solution.
Was it a nice read? Please subscribe to the blog by clicking on the 'Follow' button on the right hand side of this page. You can also subscribe by email by entering your email id in the box provided. In that case, you will be updated via email as and when new posts are published.Also, please like the Facebook Page for this blog at Gate Computer Science Ideas. Cheers!
Click here to read Part 3
Click here to read Part 3
No comments:
Post a Comment